작은 물체를 정교한 기술로 쌓을 수 있는 새 로봇 기술이 공개됐다.
구글 딥마인드(Google's DeepMind)가 작은 물체를 균형감 있게 쌓는 로봇 기술을 선보였다. 해당 기술은 지난달 런던에서 로봇기술학회(Conference on Robot Learning, CoRL)에 소개됐다. 로봇 기술은 지금까지 눈부신 발전을 이뤘지만, 작은 막대기를 통나무 위에 올려 균형을 맞추거나 조약돌을 쌓는 데는 여전히 서툴다. AI 로봇이 가진 정교함을 기술이라 부르기엔 턱없이 부족한 것이다.
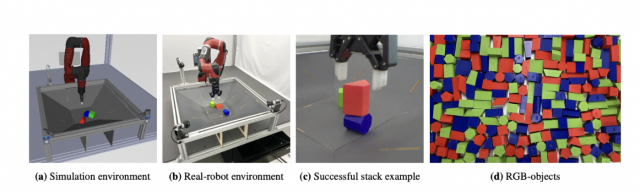
딥마인드는 “로봇이 물체가 어떤 모양이든 정교하게 다룰 수 있게 하려면 다양한 기하학적 구조를 가진 물체와 상호작용하는 법을 훈련해야 한다”고 말했다. 연구진은 RGB-Stacking 훈련을 통해 정교함을 훈련을 시켰다. RGB-Stacking은 빨간색(Red), 초록색(Green), 파란색(Blue) 물체를 쌓는(Stacking) 강화학습으로, 로봇 팔을 훈련하는 방법이다. 해당 훈련은 힘을 기르는 목표가 아닌 정교한 균형 감각을 키우기 위해 이루어졌다.
Google’s DeepMind introduced RGB-Stacking for vision-based robotic manipulation in last month’s CoRL 2021 (Conference on Robot Learning) in London. RGB stands for “Red, Green, Blue” and the objective is to teach a robotic arm to stack items of various shapes through reinforcement learning (RL). RL is machine learning (ML) for a system to learn via trial and error while receiving feedback from its actions and experiences.
Stacking objects on top of another sounds simple, for humans. However, even the more advanced robots struggle with managing and executing multiple tasks at once. That is because stacking involves the combination of motor, perceptual and analytical skills and the ability to interact with various things. So, to create a new benchmark for improving robotic stacking, DeepMind researchers challenged a robot to learn to grab various objects, precisely stack and balance them on top of one another, even amidst obstacles and distractions.
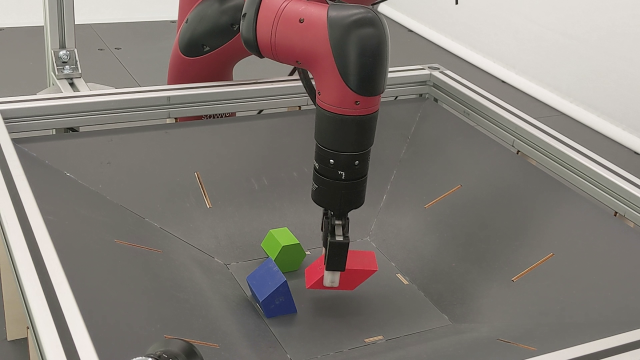
우선 바구니 위에 모양이 다른 빨간색, 녹색, 파란색 물체를 둔다. 로봇 팔은 20초 내에 빨간색 물건을 파란색 물체 위에 쌓을 수 있도록 훈련한다. 이 때, 녹색 물체는 장애물 역할을 한다. 이를 통해 로봇은 서로 다른 물체를 잡고 위에서 균형 감각을 배운다. 연구진은 의도적으로 물체를 번갈아 가면서 훈련한다. 로봇이 다양한 물체로 훈련함으로써 정교함을 습득하고자 함이다.
어느 정도 훈련 받은 로봇은 올리려는 물체가 떨어지면 균형감각을 재정비하고 다시 물체를 올리는 데 성공한다. 물건을 쌓을 때 연구진이 밑에 있는 물체 위치를 옮기면 즉시 모든 균형도 따라간다. 물체를 잡을 땐 미끄러운 부분은 피하고 잡기 쉬운 방향으로 선택한다.
The task was simple: stack the red object on top of the blue object within 20 seconds, while the green object served as a distraction. The learning process involved five triplets, or scenarios, for the robotic arm and gripper to undergo. Each triplet presented its own set of challenges: Triplet 1 required precise grasp of the top object (red); Triplet 2 required the top (red) object to be used as a tool to flip the bottom (blue) object before stacking; Triplet 3 required balancing; Triplet 4 required precise stacking; Triplet 5 required gentle stacking to prevent the top object from rolling off. The results showed 51% success rate at stacking.
DeepMind researchers included two task versions, “Skill Mastery” and “Skill Generalisation”, with different levels of difficulty for their RGB-Stacking benchmark. In the “Skill Mastery”, the goal was to train the robotic gripper to stack for a predefined set of five triplets. Using the same triplets in “Skill Generalisation,” the goal was to train the robotic gripper with a larger set of training objects, different from the RGB objects in the “Skill Mastery” triplets, equaling more than a million potential triplets. The extensive tests help the robot learn from many experiences for more generalized purposes.
로봇과 RGB-Stacking 기술이 엄청난 성과와 잠재력을 보여주고 있지만, 아직도 큰 성장 가능성이있다는 것이 딥마인드 연구진의 판단으로, 지속해서 관련 연구를 지원할 예정이다. 연구 시뮬레이션 환경, 설계도, RGB 모델, 3D 프린팅 및 정보 등 GitHub에 모두 공개한 상태다. 딥마인드 연구원들은 이 RGB-Stacking 벤치마크를 통해 "딥마인드가 조작을 훨씬 더 쉽게 만들고 로봇을 더 능숙하게 만들 수 있는 새로운 아이디어와 방법에 기여할 것"이라고 말했다.
While the RGB-Stacking skills of the robotic arm and gripper have displayed tremendous results and potential, the researchers at DeepMind believe that there is much room for growth in generalization. To accelerate this growth, DeepMind has open-sourced a version of their simulation environment, resources and information on the robot-RGB-stacking environment, and more on GitHub and to the public. DeepMind researchers said that their ultimate goal with this RGB-Stacking benchmark is to “contribute to new ideas and methods that can make manipulation even easier and robots more capable.” The idea is to go beyond the one-dimensional, simple pick-and-place strategy, and to advance science for the benefit of humanity.